Projects: Traffic and mobility

SUSTAINABLE URBAN MOBILITY PLAN OF CALVIÁ, MALLORCA
SUSTAINABLE AND INTELLIGENT URBAN MOBILITY PLAN (PMUSI) DEVELOPMENT OF CALVIÀ, MALLORCA
Real sustainable urban mobility plan with an inclusive vision
Area of activity
TRAFFIC AND MOBILITY
Service
Sustainable Urban Mobility
Client
Calviá City Council
Scope
- Diagnosis
- Citizen participation
- Objectives and Action Plans
- Indicators and Monitoring
- Strategic Plan development
- Follow-up Implementation
Duration
2021-2022
With the Sustainable and Intelligent Urban Mobility Plan (PMUSI) of the municipality of Calviá, we want to allow the identification of the existing needs and the general objectives to be established in order to plan, schedule and coordinate those actions that affect the mobility of the municipality. The population of Calviá in the year 2020 has been of 57,710 inhabitants.
With the development of the PMUSI it is expected to achieve, not only a circulation plan, but a real sustainable urban development plan with an integrating vision that contributes to the achievement of a more sustainable and intelligent city. This plan will result in specific operations in development of the lines of action of the sustainable urban development strategy (EDUSI 2030), understanding that these will be, among others, those that the plan will prioritize and plan in the short term.
The PMUSI will be based on efficiency, environmental respect, accessibility and quality of life for citizens, creating sustainable mobility strategies in the municipality of Calvià that reduce greenhouse gas emissions into the atmosphere and cover the needs of both residents and workers and tourists.
The developing of the PMUSI involves, as a minimum, the detailed elaboration of the following items:
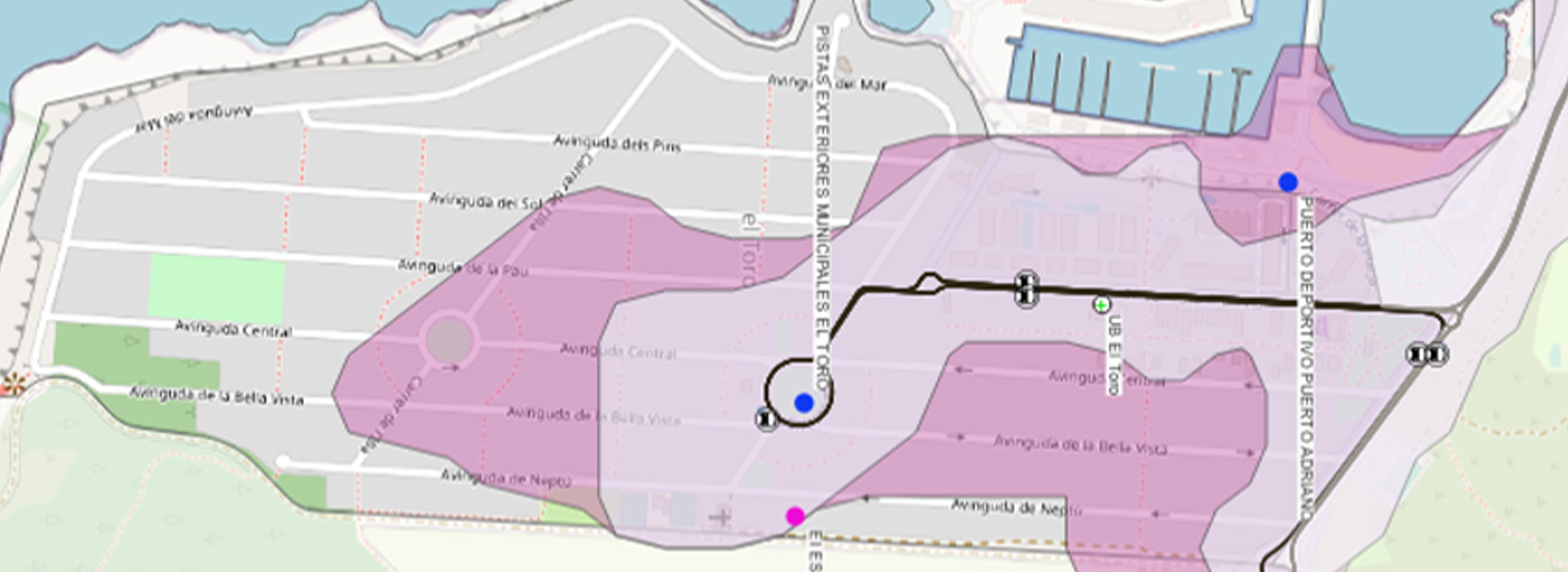
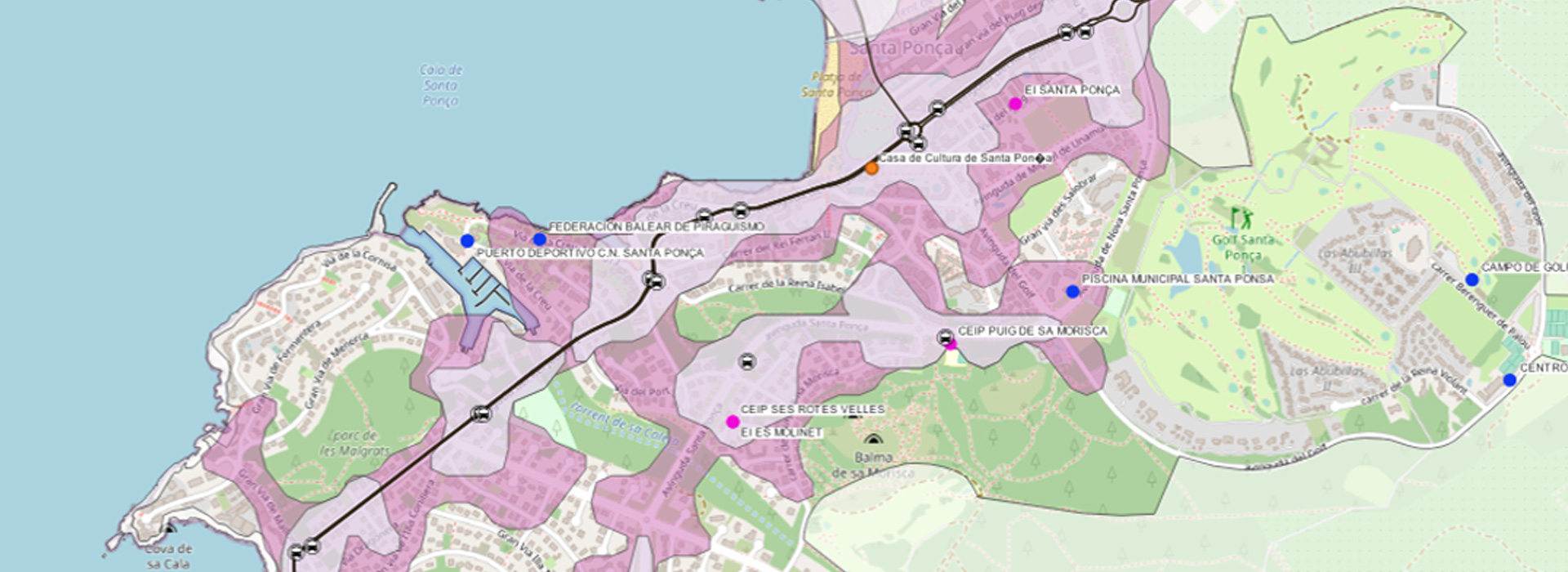
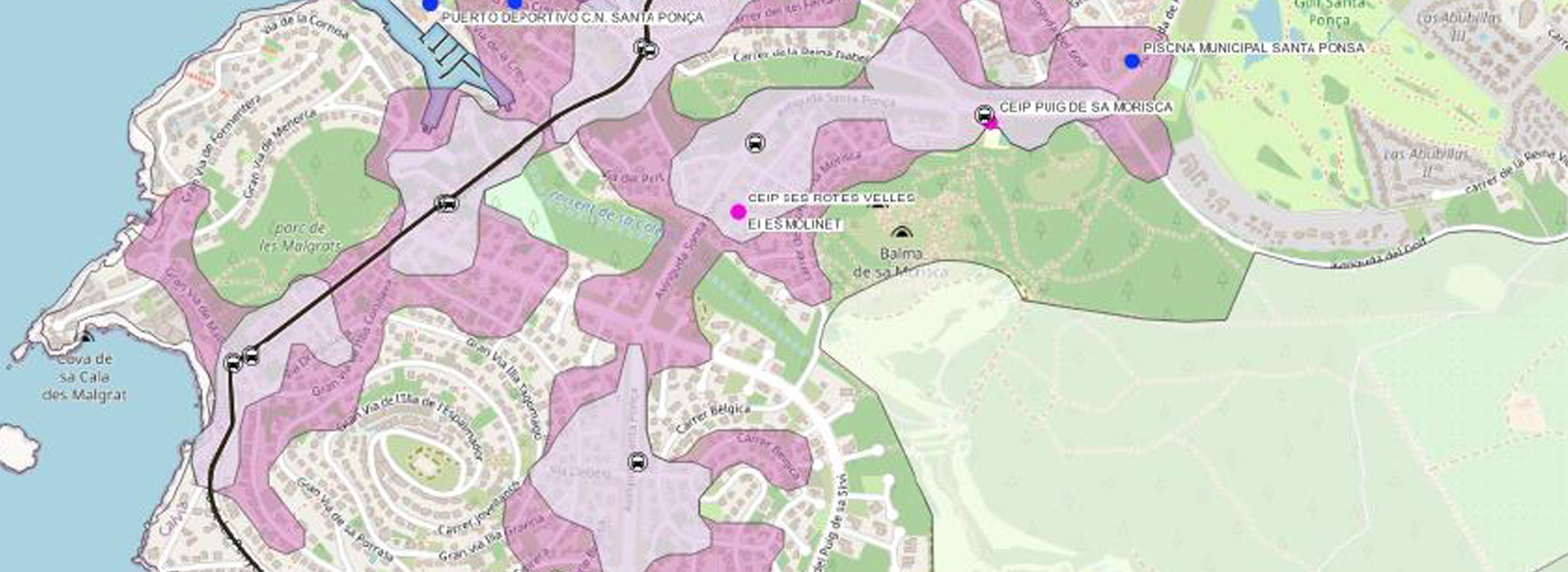
- Study of the current situation of the municipality.
- Analysis and development of an integrated SWOT diagnosis.
- Plan and programs of operations and actions.
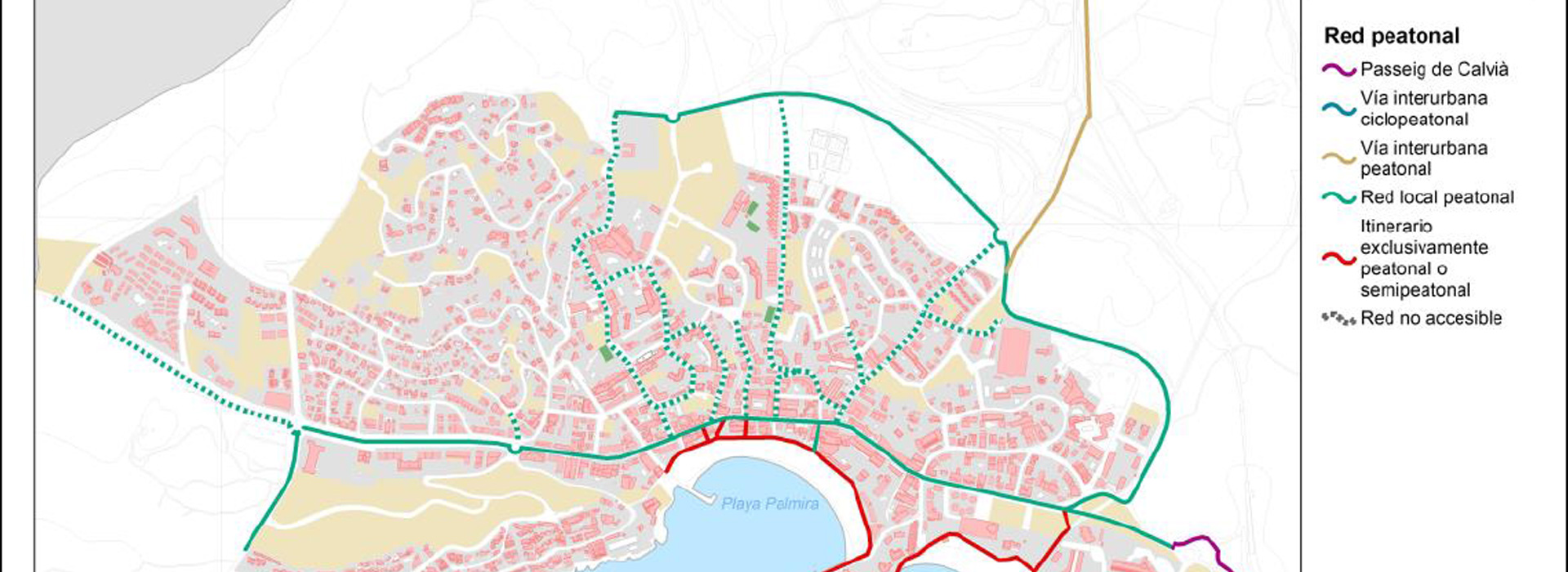
- Accessibility plan updating.
- Public participation process.
- Manual of good practices for its diffusion among the citizenship.
Evaluation and monitoring plan.